Hierarchy
-
Float64Array
- Vector3
Implements
Indexable
Brief
Vector3 represents 3D vectors as a set of three numerical components. It implements Vector interface.
Main features
- Array like access
u[0],u[1], ... - Algebra
add,mul,neg - Geometry
angle,cross,dist,rot, ... - Coordinates system accessors
x,y,z,r,theta,lat,lon... - Basis generators like
ex,er(u),e(k), ...
Getting Started
Vector3 objects are made of an array of three cartesian coordinates in an arbitrary basis [x, y, z].
They can be considered the following column vector :

Coordinates systems
Before explaining any code lets start by understanding a little diagram.
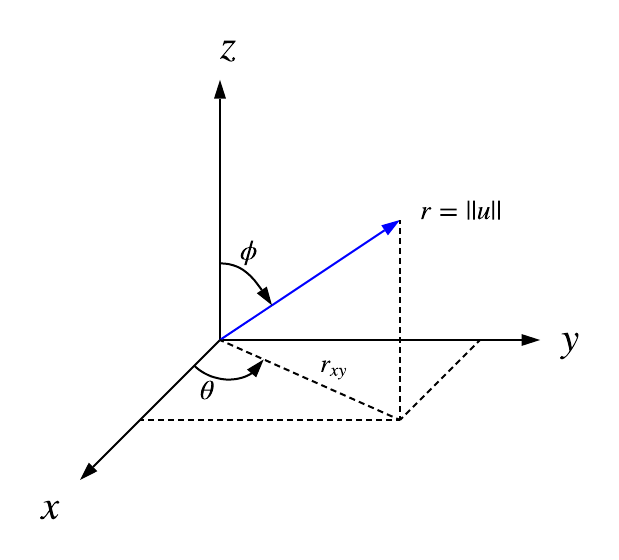
This diagram represents 3D space provided with an orthonormal basis, we see that u can be
decomposed in three different coordinates systems :
- cartesian coordinates
(x, y, z) - cylindrical coordinates
(rxy, theta, z) - spherical coordinates
(r, theta, phi)
Note θ and Φ are respectively denoted theta and phi in the framework
The diagram specifies which convention are chosen for the coordinates systems provided.
You can use the coordinates accessors to get and set the value of the coordinates.
Example
let u = Vector3.ones; // u = (1, 1, 1)
u.r; // +sqrt(3)
u.x = 1; // 1
u.theta; // +pi/4
u.xyz; // [1, 1, 1]
u.r = 1; // u = 1/sqrt(3) * (1, 1, 1)Geometrical features
Perform rotations, compute angles, cross product, ...
Example
let u = Vector3.ones, ex = Vector3.ex; // (1, 1, 1) (1, 0, 0)
u.angle(ex); // +pi/4
ex.cross(ex); // (0, 0, 0)
ex.rotZ(Math.PI / 2); // ex becomes eyIf you want to get deep into rotation features see Object3.
Standard basis
Represent the standard basis of 3D space made of :
ex = (1, 0, 0)ey = (0, 1, 0)ez = (0, 0, 1)
You can represent the basis (ex, ey, ez) on the following diagram :
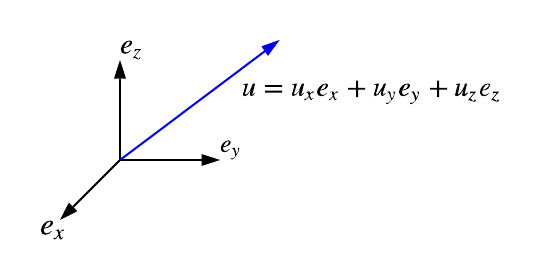
ex, ey and ez often respectively represents left, up and forward directions in computer graphics.
Anyway the first notation seems more general because math equations often use it without necessarily referring to these particular directions.
For example ex, ey, ez as respectively right, forward, up directions is often used in mechanics.
Note Here we have drawn ex, ey and ez as respectively right, forward, up.
You can then generate vectors of this standard basis
Example
let ex = Vector3.ex, ey = Vector3.ey, ez = Vector3.ez;Spherical and cylindrical basis
The spherical basis vectors at u is represented bellow.
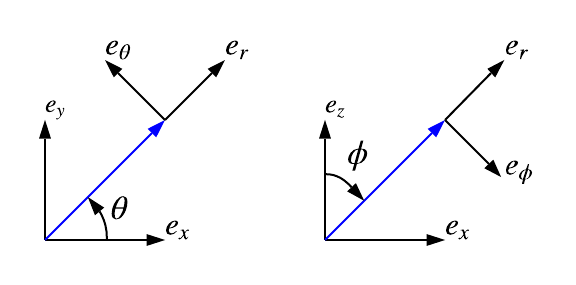
Note All the vector of a local basis are orthogonal to each other and of norm 1.
You can generate or compute a local basis vector of the two coordinates systems.
Example
let er = Vector3.er(u), etheta = Vector3.etheta(u);
w = w.erxy(Vector3.ones) // w = 1/sqrt(2) * (1, 1, 0);Index
Constructors
Properties
Accessors
Methods
- __@iterator
- abs
- absc
- add
- addc
- angle
- area
- array
- assign
- berp
- berpc
- ceil
- ceilc
- clone
- comb
- combc
- copy
- copy
Within - cos
- cross
- crossc
- der
- derc
- dist
- dist1
- dist2
- div
- divc
- dot
- entries
- ephi
- equal1
- equal2
- er
- erxy
- etheta
- every
- exact
- fill
- fillc
- filter
- find
- find
Index - floor
- floorc
- for
Each - gaussian
- herp
- herpc
- includes
- index
Of - inv
- invc
- join
- keys
- last
Index Of - lerp
- lerpc
- map
- max
- maxc
- min
- minc
- mul
- mulc
- neg
- negc
- nil
- norm
- normc
- prod
- prodc
- random
- reduce
- reduce
Right - reset0
- reset1
- reverse
- rot
- rotX
- rotY
- rotZ
- round
- roundc
- set
- slice
- some
- sort
- string
- sub
- subarray
- subc
- to
Locale String - to
String - trunc
- truncc
- values
- zero1
- zero2
- array
- e
- en
- ephi
- er
- erxy
- etheta
- gaussian
- random
- rthph
- rthz
- scalar
Constructors
constructor
-
Parameters
-
Optional x: number
-
Optional y: number
-
Optional z: number
Returns Vector3
-
Properties
BYTES_PER_ELEMENT
The size in bytes of each element in the array.
__@toStringTag
buffer
The ArrayBuffer instance referenced by the array.
byteLength
The length in bytes of the array.
byteOffset
The offset in bytes of the array.
dim
length
The length of the array.
Static Float64Array
Accessors
lat
-
latitude of the vector in radians
Returns number
-
latitude of the vector in radians
Parameters
-
newLat: number
Returns void
-
lon
-
longitude of the vector in radians
Returns number
-
longitude of the vector in radians
Parameters
-
newLon: number
Returns void
-
mag
-
length of the vector
Returns number
mag2
-
squared length of the vector
Returns number
phi
-
third spherical coordinate, clockwise angle formed with
ezin radiansReturns number
-
third spherical coordinate, clockwise angle formed with
ezin radiansParameters
-
newPhi: number
Returns void
-
r
-
first spherical coordinate, length of the vector
Returns number
-
first spherical coordinate, length of the vector
Parameters
-
newR: number
Returns void
-
rthph
-
spherical coordinates of the vector
Returns [number, number, number]
-
spherical coordinates of the vector
Parameters
-
coordinates: [number, number, number]
Returns void
-
rthz
-
cylindrical coordinates of the vector
Returns [number, number, number]
-
cylindrical coordinates of the vector
Parameters
-
coordinates: [number, number, number]
Returns void
-
rxy
-
first cylindrical coordinate, length of the projection of the vector on the plane formed with
ex,eyReturns number
-
first cylindrical coordinate, length of the projection of the vector on the plane formed with
ex,eyParameters
-
newRxy: number
Returns void
-
theta
-
second cylindrical and spherical coordinate, counterclockwise angle formed with
exin radiansReturns number
-
second cylindrical and spherical coordinate, counterclockwise angle formed with
exin radiansParameters
-
newTheta: number
Returns void
-
x
-
first cartesian coordinate
Returns number
-
first cartesian coordinate
Parameters
-
newX: number
Returns void
-
xyz
-
cartesian coordinates of the vector
Returns [number, number, number]
-
cartesian coordinates of the vector
Parameters
-
coordinates: [number, number, number]
Returns void
-
y
-
second cartesian coordinate
Returns number
-
second cartesian coordinate
Parameters
-
newY: number
Returns void
-
z
-
third cartesian coordinate
Returns number
-
third cartesian coordinate
Parameters
-
newZ: number
Returns void
-
Static dim
-
Returns number
Static ex
-
Returns Vector3
Static exn
-
opposite of the first vector of standard basis
(-1, 0, 0)Returns Vector3
Static ey
-
second vector of standard basis
(0, 1, 0)Returns Vector3
Static eyn
-
opposite of the second vector of standard basis
(0, -1, 0)Returns Vector3
Static ez
-
third vector of standard basis
(0, 0, 1)Returns Vector3
Static ezn
-
third vector of standard basis
(0, 0, -1)Returns Vector3
Static ones
-
vector filled with
1Returns Vector3
Static zeros
-
vector filled with
0Returns Vector3
Methods
__@iterator
-
Returns IterableIterator<number>
abs
-
Returns this
absc
-
Returns Vector3
add
-
Parameters
-
u: Vector
Returns this
-
addc
angle
-
unsigned angle between two vectors in radians
Parameters
-
u: Vector
Returns number
-
area
-
area of the parallelepiped formed with the two vectors
Parameters
-
u: Vector
Returns number
-
array
-
Returns number[]
assign
-
Parameters
-
x: number
-
y: number
-
z: number
Returns this
-
berp
berpc
ceil
-
Returns this
ceilc
-
Returns Vector3
clone
-
Returns Vector3
comb
-
Parameters
-
s: number
-
u: Vector
Returns this
-
combc
copy
-
Parameters
-
u: Vector
Returns this
-
copyWithin
-
Returns the this object after copying a section of the array identified by start and end to the same array starting at position target
Parameters
-
target: number
If target is negative, it is treated as length+target where length is the length of the array.
-
start: number
If start is negative, it is treated as length+start. If end is negative, it is treated as length+end.
-
Optional end: number
If not specified, length of the this object is used as its default value.
Returns this
-
cos
-
cosine of the angle between two vector
Parameters
-
u: Vector
Returns number
-
cross
-
cross product of two vector
u x vParameters
-
u: Vector
Returns this
-
crossc
der
-
Parameters
-
ds: number
-
u: Vector
Returns this
-
derc
dist
-
Parameters
-
u: Vector
Returns number
-
dist1
-
Parameters
-
u: Vector
Returns number
-
dist2
-
Parameters
-
u: Vector
Returns number
-
div
-
Parameters
-
s: number
Returns this
-
divc
-
Parameters
-
s: number
Returns Vector3
-
dot
-
Parameters
-
u: Vector
Returns number
-
entries
-
Returns an array of key, value pairs for every entry in the array
Returns IterableIterator<[number, number]>
ephi
-
Parameters
-
u: Vector
Returns this
-
equal1
-
Parameters
-
u: Vector
Returns boolean
-
equal2
-
Parameters
-
u: Vector
Returns boolean
-
er
-
Parameters
-
u: Vector
Returns this
-
erxy
-
Parameters
-
u: Vector
Returns this
-
etheta
-
Parameters
-
u: Vector
Returns this
-
every
-
Determines whether all the members of an array satisfy the specified test.
Parameters
-
callbackfn: function
A function that accepts up to three arguments. The every method calls the callbackfn function for each element in array1 until the callbackfn returns false, or until the end of the array.
-
-
Parameters
-
value: number
-
index: number
-
array: Float64Array
Returns boolean
-
-
-
-
Optional thisArg: any
An object to which the this keyword can refer in the callbackfn function. If thisArg is omitted, undefined is used as the this value.
Returns boolean
-
exact
-
Parameters
-
u: Vector
Returns boolean
-
fill
-
Parameters
-
s: number
Returns this
-
fillc
-
Parameters
-
s: number
Returns Vector3
-
filter
-
Returns the elements of an array that meet the condition specified in a callback function.
Parameters
-
callbackfn: function
A function that accepts up to three arguments. The filter method calls the callbackfn function one time for each element in the array.
-
-
Parameters
-
value: number
-
index: number
-
array: Float64Array
Returns any
-
-
-
-
Optional thisArg: any
An object to which the this keyword can refer in the callbackfn function. If thisArg is omitted, undefined is used as the this value.
Returns Float64Array
-
find
-
Returns the value of the first element in the array where predicate is true, and undefined otherwise.
Parameters
-
predicate: function
find calls predicate once for each element of the array, in ascending order, until it finds one where predicate returns true. If such an element is found, find immediately returns that element value. Otherwise, find returns undefined.
-
-
Parameters
-
value: number
-
index: number
-
obj: Float64Array
Returns boolean
-
-
-
-
Optional thisArg: any
If provided, it will be used as the this value for each invocation of predicate. If it is not provided, undefined is used instead.
Returns number | undefined
-
findIndex
-
Returns the index of the first element in the array where predicate is true, and -1 otherwise.
Parameters
-
predicate: function
find calls predicate once for each element of the array, in ascending order, until it finds one where predicate returns true. If such an element is found, findIndex immediately returns that element index. Otherwise, findIndex returns -1.
-
-
Parameters
-
value: number
-
index: number
-
obj: Float64Array
Returns boolean
-
-
-
-
Optional thisArg: any
If provided, it will be used as the this value for each invocation of predicate. If it is not provided, undefined is used instead.
Returns number
-
floor
-
Returns this
floorc
-
Returns Vector3
forEach
-
Performs the specified action for each element in an array.
Parameters
-
callbackfn: function
A function that accepts up to three arguments. forEach calls the callbackfn function one time for each element in the array.
-
-
Parameters
-
value: number
-
index: number
-
array: Float64Array
Returns void
-
-
-
-
Optional thisArg: any
An object to which the this keyword can refer in the callbackfn function. If thisArg is omitted, undefined is used as the this value.
Returns void
-
gaussian
-
Parameters
-
xm: number
average value of
x -
ym: number
average value of
y -
zm: number
average value of
z -
xd: number
standard deviation along
xaxis -
Default value yd: number = xd
standard deviation along
yaxis -
Default value zd: number = xd
standard deviation along
zaxis
Returns this
-
herp
herpc
includes
-
Determines whether an array includes a certain element, returning true or false as appropriate.
Parameters
-
searchElement: number
The element to search for.
-
Optional fromIndex: number
The position in this array at which to begin searching for searchElement.
Returns boolean
-
indexOf
-
Returns the index of the first occurrence of a value in an array.
Parameters
-
searchElement: number
The value to locate in the array.
-
Optional fromIndex: number
The array index at which to begin the search. If fromIndex is omitted, the search starts at index 0.
Returns number
-
inv
-
Returns this
invc
-
Returns Vector3
join
-
Adds all the elements of an array separated by the specified separator string.
Parameters
-
Optional separator: string
A string used to separate one element of an array from the next in the resulting String. If omitted, the array elements are separated with a comma.
Returns string
-
keys
-
Returns an list of keys in the array
Returns IterableIterator<number>
lastIndexOf
-
Returns the index of the last occurrence of a value in an array.
Parameters
-
searchElement: number
The value to locate in the array.
-
Optional fromIndex: number
The array index at which to begin the search. If fromIndex is omitted, the search starts at index 0.
Returns number
-
lerp
-
Parameters
-
u: Vector
-
s: number
Returns this
-
lerpc
map
-
Calls a defined callback function on each element of an array, and returns an array that contains the results.
Parameters
-
callbackfn: function
A function that accepts up to three arguments. The map method calls the callbackfn function one time for each element in the array.
-
-
Parameters
-
value: number
-
index: number
-
array: Float64Array
Returns number
-
-
-
-
Optional thisArg: any
An object to which the this keyword can refer in the callbackfn function. If thisArg is omitted, undefined is used as the this value.
Returns Float64Array
-
max
-
Parameters
-
u: Vector
Returns this
-
maxc
min
-
Parameters
-
u: Vector
Returns this
-
minc
mul
-
Parameters
-
s: number
Returns this
-
mulc
-
Parameters
-
s: number
Returns Vector3
-
neg
-
Returns this
negc
-
Returns Vector3
nil
-
Returns boolean
norm
-
Returns this
normc
-
Returns Vector3
prod
-
Hadamard product of two vectors
Parameters
-
u: Vector
Returns this
-
prodc
random
-
Returns this
reduce
-
Calls the specified callback function for all the elements in an array. The return value of the callback function is the accumulated result, and is provided as an argument in the next call to the callback function.
Parameters
-
callbackfn: function
A function that accepts up to four arguments. The reduce method calls the callbackfn function one time for each element in the array.
-
-
Parameters
-
previousValue: number
-
currentValue: number
-
currentIndex: number
-
array: Float64Array
Returns number
-
-
-
Returns number
-
-
Parameters
-
callbackfn: function
-
-
Parameters
-
previousValue: number
-
currentValue: number
-
currentIndex: number
-
array: Float64Array
Returns number
-
-
-
-
initialValue: number
Returns number
-
-
Calls the specified callback function for all the elements in an array. The return value of the callback function is the accumulated result, and is provided as an argument in the next call to the callback function.
Type parameters
-
U
Parameters
-
callbackfn: function
A function that accepts up to four arguments. The reduce method calls the callbackfn function one time for each element in the array.
-
-
Parameters
-
previousValue: U
-
currentValue: number
-
currentIndex: number
-
array: Float64Array
Returns U
-
-
-
-
initialValue: U
If initialValue is specified, it is used as the initial value to start the accumulation. The first call to the callbackfn function provides this value as an argument instead of an array value.
Returns U
-
reduceRight
-
Calls the specified callback function for all the elements in an array, in descending order. The return value of the callback function is the accumulated result, and is provided as an argument in the next call to the callback function.
Parameters
-
callbackfn: function
A function that accepts up to four arguments. The reduceRight method calls the callbackfn function one time for each element in the array.
-
-
Parameters
-
previousValue: number
-
currentValue: number
-
currentIndex: number
-
array: Float64Array
Returns number
-
-
-
Returns number
-
-
Parameters
-
callbackfn: function
-
-
Parameters
-
previousValue: number
-
currentValue: number
-
currentIndex: number
-
array: Float64Array
Returns number
-
-
-
-
initialValue: number
Returns number
-
-
Calls the specified callback function for all the elements in an array, in descending order. The return value of the callback function is the accumulated result, and is provided as an argument in the next call to the callback function.
Type parameters
-
U
Parameters
-
callbackfn: function
A function that accepts up to four arguments. The reduceRight method calls the callbackfn function one time for each element in the array.
-
-
Parameters
-
previousValue: U
-
currentValue: number
-
currentIndex: number
-
array: Float64Array
Returns U
-
-
-
-
initialValue: U
If initialValue is specified, it is used as the initial value to start the accumulation. The first call to the callbackfn function provides this value as an argument instead of an array value.
Returns U
-
reset0
-
sets vector to zeros
Returns this
reset1
-
sets vector to ones
Returns this
reverse
-
Reverses the elements in an Array.
Returns Float64Array
rot
rotX
-
See Object3 for more details
Parameters
-
theta: number
-
Default value cos: cos = Math.cos
-
Default value sin: sin = Math.sin
Returns this
-
rotY
-
See Object3 for more details
Parameters
-
theta: number
-
Default value cos: cos = Math.cos
-
Default value sin: sin = Math.sin
Returns this
-
rotZ
-
See Object3 for more details
Parameters
-
theta: number
-
Default value cos: cos = Math.cos
-
Default value sin: sin = Math.sin
Returns this
-
round
-
Returns this
roundc
-
Returns Vector3
set
-
Sets a value or an array of values.
Parameters
-
array: ArrayLike<number>
A typed or untyped array of values to set.
-
Optional offset: number
The index in the current array at which the values are to be written.
Returns void
-
slice
-
Returns a section of an array.
Parameters
-
Optional start: number
The beginning of the specified portion of the array.
-
Optional end: number
The end of the specified portion of the array.
Returns Float64Array
-
some
-
Determines whether the specified callback function returns true for any element of an array.
Parameters
-
callbackfn: function
A function that accepts up to three arguments. The some method calls the callbackfn function for each element in array1 until the callbackfn returns true, or until the end of the array.
-
-
Parameters
-
value: number
-
index: number
-
array: Float64Array
Returns boolean
-
-
-
-
Optional thisArg: any
An object to which the this keyword can refer in the callbackfn function. If thisArg is omitted, undefined is used as the this value.
Returns boolean
-
sort
-
Sorts an array.
Parameters
-
Optional compareFn: function
The name of the function used to determine the order of the elements. If omitted, the elements are sorted in ascending, ASCII character order.
-
-
Parameters
-
a: number
-
b: number
Returns number
-
-
-
Returns this
-
string
-
Returns string
sub
-
Parameters
-
u: Vector
Returns this
-
subarray
-
Gets a new Float64Array view of the ArrayBuffer store for this array, referencing the elements at begin, inclusive, up to end, exclusive.
Parameters
-
begin: number
The index of the beginning of the array.
-
Optional end: number
The index of the end of the array.
Returns Float64Array
-
subc
toLocaleString
-
Converts a number to a string by using the current locale.
Returns string
toString
-
Returns a string representation of an array.
Returns string
trunc
-
Parameters
-
decimals: number
Returns this
-
truncc
-
Parameters
-
decimals: number
Returns Vector3
-
values
-
Returns an list of values in the array
Returns IterableIterator<number>
zero1
-
Returns boolean
zero2
-
Returns boolean
Static array
-
vector from coordinates of array in the form
[x, y, z, ...]Parameters
-
arr: number[]
Returns Vector3
-
Static e
-
Parameters
-
k: number
order of the vector in basis
Returns Vector3
-
Static en
-
Parameters
-
k: number
order of the vector in basis
Returns Vector3
-
Static ephi
Static er
Static erxy
Static etheta
Static gaussian
-
vector with coordinates following gaussian law. See Vector3.gaussian for more details.
Parameters
-
xm: number
-
ym: number
-
zm: number
-
xd: number
-
Default value yd: number = xd
-
Default value zd: number = xd
Returns Vector3
-
Static random
Static rthph
Static rthz
-
vector with given cylindrical coordinates. See [[this.rthz]] for more details.
Parameters
-
rxy: number
-
theta: number
-
z: number
Returns Vector3
-
Static scalar
-
vector filled with
sParameters
-
s: number
Returns Vector3
-
Brief
Vector3 represents 3D vectors as a set of three numerical components. It implements Vector interface.
Main features
u[0],u[1], ...add,mul,negangle,cross,dist,rot, ...x,y,z,r,theta,lat,lon...ex,er(u),e(k), ...Getting Started
Vector3 objects are made of an array of three cartesian coordinates in an arbitrary basis
[x, y, z]. They can be considered the following column vector :Coordinates systems
Before explaining any code lets start by understanding a little diagram.
This diagram represents 3D space provided with an orthonormal basis, we see that
ucan be decomposed in three different coordinates systems :(x, y, z)(rxy, theta, z)(r, theta, phi)Note θ and Φ are respectively denoted
thetaandphiin the frameworkThe diagram specifies which convention are chosen for the coordinates systems provided.
You can use the coordinates accessors to get and set the value of the coordinates.
Example
let u = Vector3.ones; // u = (1, 1, 1) u.r; // +sqrt(3) u.x = 1; // 1 u.theta; // +pi/4 u.xyz; // [1, 1, 1] u.r = 1; // u = 1/sqrt(3) * (1, 1, 1)Geometrical features
Perform rotations, compute angles, cross product, ...
Example
let u = Vector3.ones, ex = Vector3.ex; // (1, 1, 1) (1, 0, 0) u.angle(ex); // +pi/4 ex.cross(ex); // (0, 0, 0) ex.rotZ(Math.PI / 2); // ex becomes eyIf you want to get deep into rotation features see Object3.
Standard basis
Represent the standard basis of 3D space made of :
ex = (1, 0, 0)ey = (0, 1, 0)ez = (0, 0, 1)You can represent the basis
(ex, ey, ez)on the following diagram :ex,eyandezoften respectively representsleft,upandforwarddirections in computer graphics.Anyway the first notation seems more general because math equations often use it without necessarily referring to these particular directions.
For example
ex,ey,ezas respectivelyright,forward,updirections is often used in mechanics.Note Here we have drawn
ex,eyandezas respectivelyright,forward,up.You can then generate vectors of this standard basis
Example
let ex = Vector3.ex, ey = Vector3.ey, ez = Vector3.ez;Spherical and cylindrical basis
The spherical basis vectors at
uis represented bellow.Note All the vector of a local basis are orthogonal to each other and of norm 1.
You can generate or compute a local basis vector of the two coordinates systems.
Example
let er = Vector3.er(u), etheta = Vector3.etheta(u); w = w.erxy(Vector3.ones) // w = 1/sqrt(2) * (1, 1, 0);