|
| | Vector3 (double_t x=0, double_t y=0, double_t z=0) |
| |
| double_t | x () const |
| |
| double_t | y () const |
| |
| double_t | z () const |
| |
| double_t | r () const |
| |
| double_t | theta () const |
| |
| double_t | phi () const |
| |
| Vector3 | rXY () const |
| |
| void | setX (double_t scalar) |
| |
| void | setY (double_t scalar) |
| |
| void | setZ (double_t scalar) |
| |
| void | setR (double_t scalar) |
| |
| void | setTheta (double_t scalar) |
| |
| void | setPhi (double_t scalar) |
| |
| void | setXYZ (double_t x, double_t y, double_t z) |
| |
| void | setRThetaZ (double_t r, double_t theta, double_t z) |
| |
| void | setRThetaPhi (double_t r, double_t theta, double_t phi) |
| |
| Vector3 & | operator^= (const Vector3 &u) |
| |
| | NVector (const std::vector< double_t > &data) |
| | Construct a vector using a std::vector. \( x_k \) represents data[k]. More...
|
| |
| | NVector (std::initializer_list< double_t > list) |
| | Construct a vector using an initializer list {}. More...
|
| |
| | NVector (size_t dim=0) |
| | Construct a vector of a given size. More...
|
| |
| | NVector (const NVector< double_t > &u) |
| | Construct a vector by using copy() method. More...
|
| |
| virtual | ~NVector ()=default |
| |
| virtual std::string | str () const |
| | Creates a string representing the vector. More...
|
| |
| size_t | dim () const |
| | Dimension of the vector. More...
|
| |
| std::vector< double_t > | array () const |
| | Creates an array with this vector. More...
|
| |
| NVector< double_t > & | operator+= (const NVector< double_t > &u) |
| |
| NVector< double_t > & | operator-= (const NVector< double_t > &u) |
| |
| virtual NVector< double_t > & | operator*= (double_ts) |
| |
| virtual NVector< double_t > & | operator/= (double_ts) |
| |
| NVector< double_t > & | operator= (const NVector< double_t > &u) |
| | Copy source object on this object using copy(). More...
|
| |
| double_t | max () const |
| | Maximum of the coordinates of the vector \( (x_0, x_1, .. x_{(n-1)}) \). More...
|
| |
| double_t | min () const |
| | Minimum of the coordinates of the vector \( (x_0, x_1, .. x_{(n-1)}) \). More...
|
| |
| size_t | maxIndex () const |
| | Index of maximum of the coordinates of vector \( (x_0, x_1, ..., x_{(n-1)}) \). More...
|
| |
| size_t | minIndex () const |
| | Index of minimum of the coordinates of vector \( (x_0, x_1, ..., x_{(n-1)}) \). More...
|
| |
| double_t | maxAbs () const |
| | Maximum of the coordinates of the vector \( (|x_0|, |x_1|, ..., |x_{(n-1)}|) \). More...
|
| |
| double_t | minAbs () const |
| | Minimum of the coordinates of the vector \( (|x_0|, |x_1|, ..., |x_{(n-1)}|) \). More...
|
| |
| size_t | maxAbsIndex () const |
| | Index of maximum of the coordinates of vector \( (|x_0|, |x_1|, ..., |x_{(n-1)}|) \). More...
|
| |
| size_t | minAbsIndex () const |
| | Index of minimum of the coordinates of vector \( (|x_0|, |x_1|, ..., |x_{(n-1)}|) \). More...
|
| |
| NVector< double_t > & | swap (size_t k1, size_t k2) |
| | Permutation of two elements. More...
|
| |
| NVector< double_t > & | shift (long iterations) |
| | Shifts this vector iterations times. More...
|
| |
| NVector< double_t > & | fill (double_ts) |
| | Fill vector with a scalar. For example fill(3) will set \( (3, 3, 3, ..., 3) \). More...
|
| |
| double_t & | operator() (long k) |
| | Simple access operator. More...
|
| |
| double_t | operator() (long k) const |
| |
| NVector< double_t > | operator() (size_t k1, size_t k2) const |
| | Manipulate sub-vector. More...
|
| |
| NVector< double_t > & | operator() (size_t k1, size_t k2) |
| | Manipulate sub-vector. More...
|
| |
| iterator | begin () |
| |
| const_iterator | begin () const |
| |
| iterator | end () |
| |
| const_iterator | end () const |
| |
Class representing 3D Euclidean space.
- Copyright
- Dahoux Sami 2018 All rights reserved.
- Date
- 04/05/2018
- Author
- samiBendou
Featuring cross product, coordinate transforms and rotations. We will use the following 3D systems of coordinates :
- \form#114 Cartesian coordinates.
- \form#115 Cylindrical coordinates. We have the following transformations :
\[ \begin{align*} & r_{xy} & = & \sqrt{x^2 + y^2} \\ & \theta & = & atan(y / x) \\ & z & = & z \\ \end{align*} \]
- \form#117 Spherical coordinates. We have the following transformations :
\[ \begin{align*} & r & = & \sqrt{x^2 + y^2 + z^2} \\ & \theta & = & atan(y / x) \\ & \phi & = & atan(r_{xy} / z) \\ \end{align*} \]
The u is stored in cartesian coordinates. Getting and
setting components generally implies a constant time calculation to translate between cartesian
and other formats.
The `Vector3` class doesn't support function operator `NVector::operator()()`. 

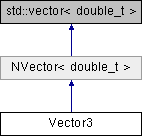
 Public Member Functions inherited from NVector< double_t >
Public Member Functions inherited from NVector< double_t > 1.8.6
1.8.6